Digital To Analog Converter (DAC)
Overview
ESP32 has two 8-bit DAC (digital to analog converter) channels respectively connected to GPIO25 (Channel 1) and GPIO26 (Channel 2). Each DAC channel can convert the digital value 0~255 to the analog voltage 0~Vref (The reference voltage 'Vref' here is input from the pin VDD3P3_RTC, which ideally equals to the power supply VDD). The output voltage can be calculated as the following:
out_voltage = Vref * digi_val / 255
The DAC peripheral supports outputting analog signal in the following ways:
Outputting a voltage directly. The DAC channel keeps outputting a specified voltage.
Outputting continuous analog signal by DMA. The DAC converts the data in a buffer at a specified frequency.
Outputting a cosine wave by the cosine wave generator. The DAC channel can output a cosine wave with specified frequency and amplitude.
For other analog output options, see Sigma-Delta Modulation and LED Control. Both modules produce high-frequency PWM/PDM output, which can be hardware low-pass filtered in order to generate a lower frequency analog output.
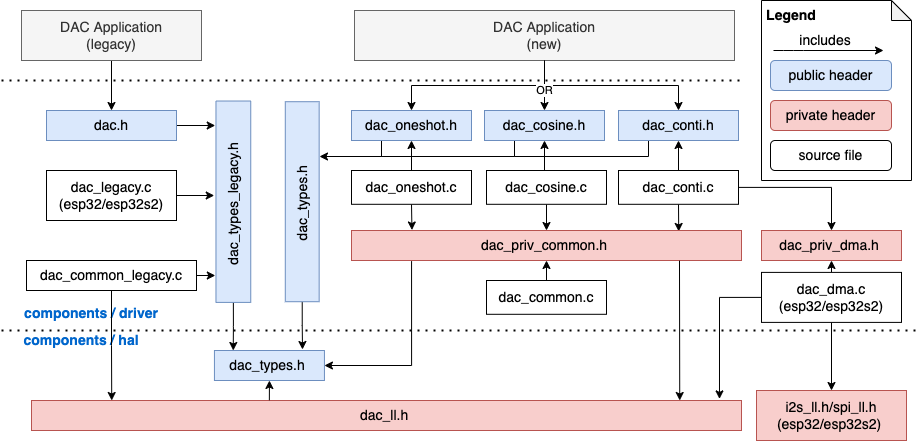
DAC File Structure
DAC File Structure
Public headers that need to be included in the DAC application are listed as follows:
dac.h: The top header file of the legacy DAC driver, which should be only included in the apps which use the legacy driver API.dac_oneshot.h: The top header file of the new DAC driver, which should be included in the apps which use the new driver API with one-shot mode.dac_cosine.h: The top header file of the new DAC driver, which should be included in the apps which use the new driver API with cosine mode.dac_continuous.h: The top header file of the new DAC driver, which should be included in the apps which use the new driver API with continuous mode.
Note
The legacy driver cannot coexist with the new driver. Include dac.h to use the legacy driver or dac_oneshot.h, dac_cosine.h, and dac_continuous.h to use the new driver. The legacy driver might be removed in the future.
Functional Overview
Resources Management
The DAC on ESP32 has two channels. The channels have separate software resources and can be managed by dac_oneshot_handle_t, dac_cosine_handle_t, or dac_continuous_handle_t according to the usage. Registering different modes on a same DAC channel is not allowed.
Direct Voltage Output (One-shot/Direct Mode)
The DAC channels in the group can convert an 8-bit digital value into the analog when dac_oneshot_output_voltage() is called (it can be called in ISR). The analog voltage is kept on the DAC channel until the next conversion starts. To start the voltage conversion, the DAC channels need to be enabled first through registering by dac_oneshot_new_channel().
Continuous Wave Output (Continuous/DMA Mode)
DAC channels can convert digital data continuously via the DMA. There are three ways to write the DAC data:
Normal writing (synchronous): Data can be transmitted at one time and kept blocked until all the data has been loaded into the DMA buffer, and the voltage is kept as the last conversion value while no more data is inputted. It is usually used to transport a long signal like an audio. To convert data continuously, the continuous channel handle need to be allocated by calling
dac_continuous_new_channels()and the DMA conversion should be enabled by callingdac_continuous_enable(). Then data can be written bydac_continuous_write()synchronously. Refer to peripherals/dac/dac_continuous/dac_audio for examples.Cyclical writing: A piece of data can be converted cyclically without blocking, and no more operation is needed after the data are loaded into the DMA buffer. But note that the inputted buffer size is limited by the number of descriptors and the DMA buffer size. It is usually used to transport short signals that need to be repeated, e.g., a sine wave. To achieve cyclical writing, call
dac_continuous_write_cyclically()after the DAC continuous mode is enabled. Refer to peripherals/dac/dac_continuous/signal_generator for examples.Asynchronous writing: Data can be transmitted asynchronously based on the event callback.
dac_event_callbacks_t::on_convert_donemust be registered to use asynchronous mode. Users can get thedac_event_data_tin the callback which contains the DMA buffer address and length, allowing them to load the data into the buffer directly. To use the asynchronous writing, calldac_continuous_register_event_callback()to register thedac_event_callbacks_t::on_convert_donebefore enabling, and thendac_continuous_start_async_writing()to start the asynchronous writing. Note that once the asynchronous writing is started, the callback function will be triggered continuously. Calldac_continuous_write_asynchronously()to load the data either in a separate task or in the callback directly. Refer to peripherals/dac/dac_continuous/dac_audio for examples.
On ESP32, the DAC digital controller can be connected internally to the I2S0 and use its DMA for continuous conversion. Although the DAC only needs 8-bit data for conversion, it has to be the left-shifted 8 bits (i.e., the high 8 bits in a 16-bit slot) to satisfy the I2S communication format. By default, the driver helps to expand the data to 16-bit wide automatically. To expand manually, please disable CONFIG_DAC_DMA_AUTO_16BIT_ALIGN in the menuconfig.
The clock of the DAC digital controller comes from I2S0 as well, so there are two clock sources for selection:
dac_continuous_digi_clk_src_t::DAC_DIGI_CLK_SRC_PLL_D2supports frequency between 19.6 KHz to several MHz. It is the default clock which can also be selected bydac_continuous_digi_clk_src_t::DAC_DIGI_CLK_SRC_DEFAULT.dac_continuous_digi_clk_src_t::DAC_DIGI_CLK_SRC_APLLsupports frequency between 648 Hz to several MHz. However, it might be occupied by other peripherals, thus not providing the required frequency. In such case, this clock source is available only if APLL still can be correctly divided into the target DAC DMA frequency.
Cosine Wave Output (Cosine Mode)
The DAC peripheral has a cosine wave generator, which can generate cosine wave on the channels. Users can specify the frequency, amplitude, and phase of the cosine wave. To output the cosine wave, please acquire the DAC to cosine mode using dac_cosine_new_channel(), and then start the cosine wave generator by dac_cosine_start().
Currently, the clock source of the cosine wave generator only comes from RTC_FAST which can be selected by dac_cosine_clk_src_t::DAC_COSINE_CLK_SRC_RTC_FAST. It is also the default clock source which is the same as dac_cosine_clk_src_t::DAC_COSINE_CLK_SRC_RTC_DEFAULT.
Power Management
When the power management is enabled (i.e., CONFIG_PM_ENABLE is on), the system will adjust or stop the clock source of DAC before entering Light-sleep mode, thus potential influence to the DAC signals may lead to false data conversion.
When using DAC driver in continuous mode, it can prevent the system from changing or stopping the clock source in DMA or cosine mode by acquiring a power management lock. When the clock source is generated from APB, the lock type will be set to esp_pm_lock_type_t::ESP_PM_APB_FREQ_MAX. When the clock source is APLL (only in DMA mode), it will be set to esp_pm_lock_type_t::ESP_PM_NO_LIGHT_SLEEP. Whenever the DAC is converting (i.e., DMA or cosine wave generator is working), the driver guarantees that the power management lock is acquired after calling dac_continuous_enable(). Likewise, the driver will release the lock when dac_continuous_disable() is called.
IRAM Safe
By default, the DAC DMA interrupt will be deferred when the cache is disabled for reasons like writing/erasing Flash. Thus the DMA EOF interrupt will not get executed in time.
To avoid such case in real-time applications, you can enable the Kconfig option CONFIG_DAC_ISR_IRAM_SAFE which:
Enables the interrupt being serviced even when cache is disabled;
Places driver object into DRAM (in case it is linked to PSRAM by accident).
This allows the interrupt to run while the cache is disabled but comes at the cost of increased IRAM consumption.
Thread Safety
All the public DAC APIs are guaranteed to be thread safe by the driver, which means users can call them from different RTOS tasks without protection by extra locks. Notice that the DAC driver uses mutex lock to ensure the thread safety, thus the APIs except dac_oneshot_output_voltage() are not allowed to be used in ISR.
Kconfig Options
CONFIG_DAC_ISR_IRAM_SAFE controls whether the default ISR handler can work when cache is disabled. See IRAM Safe for more information.
CONFIG_DAC_SUPPRESS_DEPRECATE_WARN controls whether to suppress the warning message compilation while using the legacy DAC driver.
CONFIG_DAC_ENABLE_DEBUG_LOG is used to enable the debug log output. Enable this option increases the firmware binary size.
CONFIG_DAC_DMA_AUTO_16BIT_ALIGN auto expands the 8-bit data to 16-bit data in the driver to satisfy the I2S DMA format.
Application Example
The basic examples for the One-shot Mode, Continuous Mode, and Cosine Mode can be found in:
API Reference
Header File
This header file can be included with:
#include "driver/dac_oneshot.h"
- This header file is a part of the API provided by the
drivercomponent. To declare that your component depends ondriver, add the following to your CMakeLists.txt:
REQUIRES driveror
> PRIV_REQUIRES driver
Functions
esp_err_t dac_oneshot_new_channel(const dac_oneshot_config_t *oneshot_cfg, dac_oneshot_handle_t *ret_handle)
Allocate a new DAC oneshot channel.
Note
The channel will be enabled as well when the channel allocated
Parameters
oneshot_cfg -- [in] The configuration for the oneshot channel
ret_handle -- [out] The returned oneshot channel handle
Returns
ESP_ERR_INVALID_ARG The input parameter is invalid
ESP_ERR_INVALID_STATE The DAC channel has been registered already
ESP_ERR_NO_MEM No memory for the DAC oneshot channel resources
ESP_OK Allocate the new DAC oneshot channel success
esp_err_t dac_oneshot_del_channel(dac_oneshot_handle_t handle)
Delete the DAC oneshot channel.
Note
The channel will be disabled as well when the channel deleted
Parameters
handle -- [in] The DAC oneshot channel handle
Returns
ESP_ERR_INVALID_ARG The input parameter is invalid
ESP_ERR_INVALID_STATE The channel has already been de-registered
ESP_OK Delete the oneshot channel success
esp_err_t dac_oneshot_output_voltage(dac_oneshot_handle_t handle, uint8_t digi_value)
Output the voltage.
Note
Generally it'll take 7~11 us on ESP32 and 10~21 us on ESP32-S2
Parameters
handle -- [in] The DAC oneshot channel handle
digi_value -- [in] The digital value that need to be converted
Returns
ESP_ERR_INVALID_ARG The input parameter is invalid
ESP_OK Convert the digital value success
Structures
struct dac_oneshot_config_t
DAC oneshot channel configuration.
Public Members
dac_channel_t chan_id
DAC channel id
Type Definitions
typedef struct dac_oneshot_s *dac_oneshot_handle_t
DAC oneshot channel handle
Header File
This header file can be included with:
#include "driver/dac_cosine.h"
- This header file is a part of the API provided by the
drivercomponent. To declare that your component depends ondriver, add the following to your CMakeLists.txt:
REQUIRES driveror
> PRIV_REQUIRES driver
Functions
esp_err_t dac_cosine_new_channel(const dac_cosine_config_t *cos_cfg, dac_cosine_handle_t *ret_handle)
Allocate a new DAC cosine wave channel.
Note
Since there is only one cosine wave generator, only the first channel can set the frequency of the cosine wave. Normally, the latter one is not allowed to set a different frequency, but the it can be forced to set by setting the bit force_set_freq in the configuration, notice that another channel will be affected as well when the frequency is updated.
Parameters
cos_cfg -- [in] The configuration of cosine wave channel
ret_handle -- [out] The returned cosine wave channel handle
Returns
ESP_ERR_INVALID_ARG The input parameter is invalid
ESP_ERR_INVALID_STATE The DAC channel has been registered already
ESP_ERR_NO_MEM No memory for the DAC cosine wave channel resources
ESP_OK Allocate the new DAC cosine wave channel success
esp_err_t dac_cosine_del_channel(dac_cosine_handle_t handle)
Delete the DAC cosine wave channel.
Parameters
handle -- [in] The DAC cosine wave channel handle
Returns
ESP_ERR_INVALID_ARG The input parameter is invalid
ESP_ERR_INVALID_STATE The channel has already been deregistered
ESP_OK Delete the cosine wave channel success
esp_err_t dac_cosine_start(dac_cosine_handle_t handle)
Start outputting the cosine wave on the channel.
Parameters
handle -- [in] The DAC cosine wave channel handle
Returns
ESP_ERR_INVALID_ARG The input parameter is invalid
ESP_ERR_INVALID_STATE The channel has been started already
ESP_OK Start the cosine wave success
esp_err_t dac_cosine_stop(dac_cosine_handle_t handle)
Stop outputting the cosine wave on the channel.
Parameters
handle -- [in] The DAC cosine wave channel handle
Returns
ESP_ERR_INVALID_ARG The input parameter is invalid
ESP_ERR_INVALID_STATE The channel has been stopped already
ESP_OK Stop the cosine wave success
Structures
struct dac_cosine_config_t
DAC cosine channel configurations.
Public Members
dac_channel_t chan_id
The cosine wave channel id
uint32_t freq_hz
The frequency of cosine wave, unit: Hz. The cosine wave generator is driven by RTC_FAST clock which is divide from RC_FAST, With the default RTC clock, the minimum frequency of cosine wave is about 130 Hz, Although it can support up to several MHz frequency theoretically, the waveform will distort at high frequency due to the hardware limitation. Typically not suggest to set the frequency higher than 200 KHz
dac_cosine_clk_src_t clk_src
The clock source of the cosine wave generator, currently only support DAC_COSINE_CLK_SRC_DEFAULT
dac_cosine_atten_t atten
The attenuation of cosine wave amplitude
dac_cosine_phase_t phase
The phase of cosine wave, can only support DAC_COSINE_PHASE_0 or DAC_COSINE_PHASE_180, default as 0 while setting an unsupported phase
int8_t offset
The DC offset of cosine wave
bool force_set_freq
Force to set the cosine wave frequency
struct dac_cosine_config_t flags
Flags of cosine mode
Type Definitions
typedef struct dac_cosine_s *dac_cosine_handle_t
DAC cosine wave channel handle
Header File
This header file can be included with:
#include "driver/dac_continuous.h"
- This header file is a part of the API provided by the
drivercomponent. To declare that your component depends ondriver, add the following to your CMakeLists.txt:
REQUIRES driveror
> PRIV_REQUIRES driver
Functions
esp_err_t dac_continuous_new_channels(const dac_continuous_config_t *cont_cfg, dac_continuous_handle_t *ret_handle)
Allocate new DAC channels in continuous mode.
Note
The DAC channels can't be registered to continuous mode separately
Parameters
cont_cfg -- [in] Continuous mode configuration
ret_handle -- [out] The returned continuous mode handle
Returns
ESP_ERR_INVALID_ARG The input parameter is invalid
ESP_ERR_INVALID_STATE The DAC channel has been registered already
ESP_ERR_NOT_FOUND Not found the available dma peripheral, might be occupied
ESP_ERR_NO_MEM No memory for the DAC continuous mode resources
ESP_OK Allocate the new DAC continuous mode success
esp_err_t dac_continuous_del_channels(dac_continuous_handle_t handle)
Delete the DAC continuous handle.
Parameters
handle -- [in] The DAC continuous channel handle that obtained from 'dac_continuous_new_channels'
Returns
ESP_ERR_INVALID_ARG The input parameter is invalid
ESP_ERR_INVALID_STATE The channels have already been deregistered or not disabled
ESP_OK Delete the continuous channels success
esp_err_t dac_continuous_enable(dac_continuous_handle_t handle)
Enabled the DAC continuous mode.
Note
Must enable the channels before
Parameters
handle -- [in] The DAC continuous channel handle that obtained from 'dac_continuous_new_channels'
Returns
ESP_ERR_INVALID_ARG The input parameter is invalid
ESP_ERR_INVALID_STATE The channels have been enabled already
ESP_OK Enable the continuous output success
esp_err_t dac_continuous_disable(dac_continuous_handle_t handle)
Disable the DAC continuous mode.
Parameters
handle -- [in] The DAC continuous channel handle that obtained from 'dac_continuous_new_channels'
Returns
ESP_ERR_INVALID_ARG The input parameter is invalid
ESP_ERR_INVALID_STATE The channels have been enabled already
ESP_OK Disable the continuous output success
esp_err_t dac_continuous_write(dac_continuous_handle_t handle, uint8_t *buf, size_t buf_size, size_t *bytes_loaded, int timeout_ms)
Write DAC data continuously.
Note
The data in buffer will only be converted one time, This function will be blocked until all data loaded or timeout then the DAC output will keep outputting the voltage of the last data in the buffer
Note
Specially, on ESP32, the data bit width of DAC continuous data is fixed to 16 bits while only the high 8 bits are available, The driver will help to expand the inputted buffer automatically by default, you can also align the data to 16 bits manually by clearing CONFIG_DAC_DMA_AUTO_16BIT_ALIGN in menuconfig.
Parameters
handle -- [in] The DAC continuous channel handle that obtained from 'dac_continuous_new_channels'
buf -- [in] The digital data buffer to convert
buf_size -- [in] The buffer size of digital data buffer
bytes_loaded -- [out] The bytes that has been loaded into DMA buffer, can be NULL if don't need it
timeout_ms -- [in] The timeout time in millisecond, set a minus value means will block forever
Returns
ESP_ERR_INVALID_ARG The input parameter is invalid
ESP_ERR_INVALID_STATE The DAC continuous mode has not been enabled yet
ESP_ERR_TIMEOUT Waiting for semaphore or message queue timeout
ESP_OK Success to output the acyclic DAC data
esp_err_t dac_continuous_write_cyclically(dac_continuous_handle_t handle, uint8_t *buf, size_t buf_size, size_t *bytes_loaded)
Write DAC continuous data cyclically.
Note
The data in buffer will be converted cyclically using DMA once this function is called, This function will return once the data loaded into DMA buffers.
Note
The buffer size of cyclically output is limited by the descriptor number and dma buffer size while initializing the continuous mode. Concretely, in order to load all the data into descriptors, the cyclic buffer size is not supposed to be greater than desc_num * buf_size
Note
Specially, on ESP32, the data bit width of DAC continuous data is fixed to 16 bits while only the high 8 bits are available, The driver will help to expand the inputted buffer automatically by default, you can also align the data to 16 bits manually by clearing CONFIG_DAC_DMA_AUTO_16BIT_ALIGN in menuconfig.
Parameters
handle -- [in] The DAC continuous channel handle that obtained from 'dac_continuous_new_channels'
buf -- [in] The digital data buffer to convert
buf_size -- [in] The buffer size of digital data buffer
bytes_loaded -- [out] The bytes that has been loaded into DMA buffer, can be NULL if don't need it
Returns
ESP_ERR_INVALID_ARG The input parameter is invalid
ESP_ERR_INVALID_STATE The DAC continuous mode has not been enabled yet
ESP_OK Success to output the acyclic DAC data
esp_err_t dac_continuous_register_event_callback(dac_continuous_handle_t handle, const dac_event_callbacks_t *callbacks, void *user_data)
Set event callbacks for DAC continuous mode.
Note
User can deregister a previously registered callback by calling this function and setting the callback member in the callbacks structure to NULL.
Note
When CONFIG_DAC_ISR_IRAM_SAFE is enabled, the callback itself and functions called by it should be placed in IRAM. The variables used in this function, including the user_data, should be in the internal RAM as well.
Parameters
handle -- [in] The DAC continuous channel handle that obtained from 'dac_continuous_new_channels'
callbacks -- [in] Group of callback functions, input NULL to clear the former callbacks
user_data -- [in] User data, which will be passed to callback functions directly
Returns
ESP_OK Set event callbacks successfully
ESP_ERR_INVALID_ARG Set event callbacks failed because of invalid argument
esp_err_t dac_continuous_start_async_writing(dac_continuous_handle_t handle)
Start the async writing.
Note
When the asynchronous writing start, the DAC will keep outputting '0' until the data are loaded into the DMA buffer. To loaded the data into DMA buffer, 'on_convert_done' callback is required, which can be registered by 'dac_continuous_register_event_callback' before enabling
Parameters
handle -- [in] The DAC continuous channel handle that obtained from 'dac_continuous_new_channels'
Returns
ESP_OK Start asynchronous writing successfully
ESP_ERR_INVALID_ARG The handle is NULL
ESP_ERR_INVALID_STATE The channel is not enabled or the 'on_convert_done' callback is not registered
esp_err_t dac_continuous_stop_async_writing(dac_continuous_handle_t handle)
Stop the sync writing.
Parameters
handle -- [in] The DAC continuous channel handle that obtained from 'dac_continuous_new_channels'
Returns
ESP_OK Stop asynchronous writing successfully
ESP_ERR_INVALID_ARG The handle is NULL
ESP_ERR_INVALID_STATE Asynchronous writing has not started
esp_err_t dac_continuous_write_asynchronously(dac_continuous_handle_t handle, uint8_t *dma_buf, size_t dma_buf_len, const uint8_t *data, size_t data_len, size_t *bytes_loaded)
Write DAC data asynchronously.
Note
This function can be called when the asynchronous writing started, and it can be called in the callback directly but recommend to writing data in a task, referring to :example:peripherals/dac/dac_continuous/dac_audio
Parameters
handle -- [in] The DAC continuous channel handle that obtained from 'dac_continuous_new_channels'
dma_buf -- [in] The DMA buffer address, it can be acquired from 'dac_event_data_t' in the 'on_convert_done' callback
dma_buf_len -- [in] The DMA buffer length, it can be acquired from 'dac_event_data_t' in the 'on_convert_done' callback
data -- [in] The data that need to be written
data_len -- [in] The data length the need to be written
bytes_loaded -- [out] The bytes number that has been loaded/written into the DMA buffer
Returns
ESP_OK Write the data into DMA buffer successfully
ESP_ERR_INVALID_ARG NULL pointer
ESP_ERR_INVALID_STATE The channels haven't start the asynchronous writing
ESP_ERR_NOT_FOUND The param 'dam_buf' not match any existed DMA buffer
Structures
struct dac_continuous_config_t
DAC continuous channels' configurations.
Public Members
dac_channel_mask_t chan_mask
DAC channels' mask for selecting which channels are used
uint32_t desc_num
The number of DMA descriptor, at least 2 descriptors are required The number of descriptors is directly proportional to the max data buffer size while converting in cyclic output but only need to ensure it is greater than '1' in acyclic output Typically, suggest to set the number bigger than 5, in case the DMA stopped while sending a short buffer
size_t buf_size
The DMA buffer size, should be within 32~4092 bytes. Each DMA buffer will be attached to a DMA descriptor, i.e. the number of DMA buffer will be equal to the DMA descriptor number The DMA buffer size is not allowed to be greater than 4092 bytes The total DMA buffer size equal to desc_num * buf_size Typically, suggest to set the size to the multiple of 4
uint32_t freq_hz
The frequency of DAC conversion in continuous mode, unit: Hz The supported range is related to the target and the clock source. For the clock DAC_DIGI_CLK_SRC_DEFAULT: the range is 19.6 KHz to several MHz on ESP32 and 77 Hz to several MHz on ESP32-S2. For the clock DAC_DIGI_CLK_SRC_APLL: the range is 648 Hz to several MHz on ESP32 and 6 Hz to several MHz on ESP32-S2. Typically not suggest to set the frequency higher than 2 MHz, otherwise the severe distortion will appear
int8_t offset
The offset of the DAC digital data. Range -128~127
dac_continuous_digi_clk_src_t clk_src
The clock source of digital controller, which can affect the range of supported frequency Currently DAC_DIGI_CLK_SRC_DEFAULT and DAC_DIGI_CLK_SRC_APLL are available
dac_continuous_channel_mode_t chan_mode
The channel mode of continuous mode, only take effect when multiple channels enabled, depends converting the buffer alternately or simultaneously
struct dac_event_data_t
Event structure used in DAC event queue.
Public Members
void *buf
The pointer of DMA buffer that just finished sending
size_t buf_size
The writable buffer size of the DMA buffer, equal to 'dac_continuous_config_t::buf_size'
size_t write_bytes
The number of bytes that be written successfully
struct dac_event_callbacks_t
Group of DAC callbacks.
Note
The callbacks are all running under ISR environment
Note
When CONFIG_DAC_ISR_IRAM_SAFE is enabled, the callback itself and functions called by it should be placed in IRAM. The variables used in the function should be in the SRAM as well.
Public Members
dac_isr_callback_t on_convert_done
Callback of data conversion done event An event data buffer previously loaded to the driver has been output and converted. The event data includes DMA buffer address and size that just finished converting.
dac_isr_callback_t on_stop
Callback of finished sending all the data. All loaded event data buffers are converted. Driver is pending for new data buffers to be loaded. The event data will be NULL in this callback.
Type Definitions
typedef struct dac_continuous_s *dac_continuous_handle_t
DAC continuous channel handle
typedef bool (*dac_isr_callback_t)(dac_continuous_handle_t handle, const dac_event_data_t *event, void *user_data)
DAC event callback.
Param handle
[in] DAC channel handle, created from dac_continuous_new_channels()
Param event
[in] DAC event data
Param user_data
[in] User registered context, passed from dac_continuous_register_event_callback()
Return
Whether a high priority task has been waken up by this callback function
Enumerations
enum dac_channel_mask_t
DAC channel mask.
Values:
enumerator DAC_CHANNEL_MASK_CH0
DAC channel 0 is GPIO25(ESP32) / GPIO17(ESP32S2)
enumerator DAC_CHANNEL_MASK_CH1
DAC channel 1 is GPIO26(ESP32) / GPIO18(ESP32S2)
enumerator DAC_CHANNEL_MASK_ALL
Both DAC channel 0 and channel 1
Header File
This header file can be included with:
#include "driver/dac_types.h"
- This header file is a part of the API provided by the
drivercomponent. To declare that your component depends ondriver, add the following to your CMakeLists.txt:
REQUIRES driveror
> PRIV_REQUIRES driver
Type Definitions
typedef soc_periph_dac_digi_clk_src_t dac_continuous_digi_clk_src_t
DAC DMA (digitial controller) clock source.
typedef soc_periph_dac_cosine_clk_src_t dac_cosine_clk_src_t
DAC cosine wave generator clock source.
Enumerations
enum dac_continuous_channel_mode_t
DAC channel work mode in dma mode.
Note
Only take effect when multiple channels enabled.
Note
Assume the data in buffer is 'A B C D E F' DAC_CHANNEL_MODE_SIMUL:
channel 0: A B C D E F
channel 1: A B C D E F DAC_CHANNEL_MODE_ALTER:
channel 0: A C E
channel 1: B D F
Values:
enumerator DAC_CHANNEL_MODE_SIMUL
The data in the DMA buffer is simultaneously output to the enable channel of the DAC.
enumerator DAC_CHANNEL_MODE_ALTER
The data in the DMA buffer is alternately output to the enable channel of the DAC.
Header File
This header file can be included with:
#include "hal/dac_types.h"
Enumerations
enum dac_channel_t
Values:
enumerator DAC_CHAN_0
DAC channel 0 is GPIO25(ESP32) / GPIO17(ESP32S2)
enumerator DAC_CHAN_1
DAC channel 1 is GPIO26(ESP32) / GPIO18(ESP32S2)
enumerator DAC_CHANNEL_1
Alias of 'DAC_CHAN_0', now the channel index start from '0'
enumerator DAC_CHANNEL_2
Alias of 'DAC_CHAN_1', now the channel index start from '0'
enum dac_cosine_atten_t
The attenuation of the amplitude of the cosine wave generator. The max amplitude is VDD3P3_RTC.
Values:
enumerator DAC_COSINE_ATTEN_DEFAULT
No attenuation to the DAC cosine wave amplitude. Default.
enumerator DAC_COSINE_ATTEN_DB_0
Original amplitude of the DAC cosine wave, equals to DAC_COSINE_ATTEN_DEFAULT
enumerator DAC_COSINE_ATTEN_DB_6
1/2 amplitude of the DAC cosine wave
enumerator DAC_COSINE_ATTEN_DB_12
1/4 amplitude of the DAC cosine wave
enumerator DAC_COSINE_ATTEN_DB_18
1/8 amplitude of the DAC cosine wave
enum dac_cosine_phase_t
Set the phase of the cosine wave generator output.
Note
Only 0 or 180 are supported, it will be set to 0 as default if configured to an unsupported phase.
Values:
enumerator DAC_COSINE_PHASE_0
Phase shift +0°
enumerator DAC_COSINE_PHASE_180
Phase shift +180°